Introduction
With the advent of the human genome era the molecular biology laboratory has once and for all changed from a small scale observatory into a semi-industrial, highly parallel environment with large numbers of samples and terabytes of processed data. The ever growing number of transcripts, genes, proteins and snips (SNPs) created great demand for high density formats and these are rather human unfriendly – our hands are very inaccurate and unreproducible equipment when it comes for dense repetitive grids, and are prone to the whole variety of errors.
This makes hand pipetting rather inelegant for demanding and sensitive protocols like genotyping, quantitation of gene expression and larger scale sequencing. Robotic stations therefore are preferred where highly repetitive pipetting in dense grids has to be performed with particular stress to speed, high accuracy and without danger of contamination – and Eppendorf by all means has taken these very prerequisites remarkably serious. Starting with the world-first adjustable microlitre pipette in early sixties Eppendorf has a long history in liquid handling and its products known for high quality, performance and precision, were always setting new trends in the laboratory practice. Also pipetting machines and liquid handling stations have a long legacy at Eppendorf: EPOS in seventies, ELAN in eighties and recently released, two state-of-the-art robotic platforms: epMotion 5070 and 5075. These two machines although different in size and having different functions have one important feature in common: The pipetting heads of epMotion – or dispensing tools as we call them - employ the same technology Eppendorf has been successfully using for decades in our pipettes: air cushion piston stroke system with disposable high precision tips. This particular approach makes not only the exchange of dispensing tool child-easy but more importantly assures that the liquid handling is completely devoid of contamination (free jet) and can be performed in the large range of volumes (down to 1 μl) with high precision and accuracy (table 1).
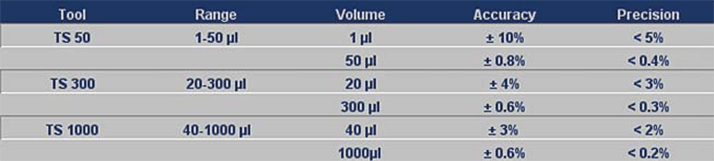 Table 1: Accuracy and precision data for the epMotion 5070/5075 dispensing tools. The data for the border volumes of the respective single channel tools (TS) is presented.
Table 1: Accuracy and precision data for the epMotion 5070/5075 dispensing tools. The data for the border volumes of the respective single channel tools (TS) is presented.But... is really a robot with disposable tips able to dispense so small amount of liquid as 1 μl in a free jet mode? Anyone who tried to do it with a pipette knows it is not that trivial task and precision is not perhaps the highest. Let’s have a closer look at the epMotion dispensing tools data, are they really so precise as stated?
>> Download the full Application Note as PDF
Newsletters
Receive the latest pathologist news, personalities, education, and career development – weekly to your inbox.